PEAS Perfomance measure , Environment , Actuators , Sensors
Pertama-tama harus menentukan pengaturan untuk
desain agen cerdas
Pertimbangkan Mis., tugas merancang supir taksi
otomatis
perfomance measure : Aman , cepat , legal ,
perjalanan menyenangkan , maksimumkan keuntungan
Environment : jalan , trafik lain , pejalan kaki ,
pelanggan
actuators : kemudi , gas , rem , lampu sign , horn
Sensors : kamera , sonar , speedometer , GPS , odometer
, engine sensors , keyboard
Simple reflex agent
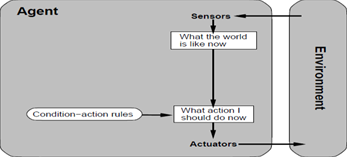
Agen ini hanya
memutuskan tindakan berdasarkan persepsi mereka saat ini . Dengan
mengidentifikasi bahwa tindakan tertentu dijamin dalam kondisi tertentu , agen
dapat membangun sebuah daftar aturan kondisi - aksi dan menggunakan mereka
untuk menentukan tindakan yang harus dilakukan .
Model-based
agent

Berikut agen mempertahankan model dunia yang
mencakup keadaan internal , pengetahuan tentang bagaimana dunia berkembang ( '
hukum alam ' dari perspektif agen ) , dan pengetahuan tentang bagaimana
tindakan agen memengaruhi dunia . Hal ini dapat membantu dengan dunia sebagian
diamati .
Goal-based agent

Goal based agents memperluas pada kemampuan
model-based agents, dengan menggunakan "goal" informasi. Tujuan
informasi menggambarkan kondisi yang diinginkan. Hal ini memungkinkan agen cara
untuk memilih di antara beberapa kemungkinan, memilih satu yang mencapai negara
tujuan. Search dan planing adalah sub bidang kecerdasan buatan yang ditujukan
untuk urutan tindakan menemukan bahwa mencapai tujuan agen. Dalam beberapa
kasus goal-based agent tampaknya kurang efisien; itu lebih fleksibel karena
pengetahuan yang mendukung keputusan diwakili secara eksplisit dan dapat
dimodifikasi.
Utility-based agent

“Goal” tidak cukup untuk menghasilkan perilaku
berkualitas tinggi. Ada banyak urutan tindakan untuk mencapai tujuan,
tetapi beberapa yang lebih cepat, lebih aman, lebih dapat diandalkan, atau
lebih murah daripada yang lain. Tujuan hanya memberikan perbedaan antara
kondisi "bahagia" dan "tidak bahagia", sedangkan ukuran
kinerja yang lebih umum harus memungkinkan perbandingan beberapa urutan kondisi
yang berbeda jika agen ingin mencapai tujuan. Terminologi yang dipergunakan
untuk mengatakan bahwa jika satu kondisi lebih disukai daripada kondisi yang
lain, itu mempunyai utilitas yang lebih tinggi untuk agent.
Learning agent

memiliki
unsur kinerja yang memutuskan tindakan yang harus diambil, dan elemen
pembelajaran yang dapat mengubah elemen peformance untuk menjadi lebih efisien
sebagai agen belajar . Sebuah komponen kritikus digunakan untuk mengevaluasi
seberapa baik agen melakukan dan memberikan umpan balik kepada komponen
pembelajaran , dan generator masalah yang dapat menyimpang dari rutinitas yang
biasa dan dan menjelajahi kemungkinan-kemungkinan baru . ( Kritikus dan
generator masalah sebenarnya dapat dianggap sebagai bagian dari komponen
pembelajaran karena mereka berdua membantu untuk belajar . )
sumber :
Tidak ada komentar:
Posting Komentar